Table of Contents
Algorithm
Leetcode 636: https://leetcode.com/problems/find-peak-element/
https://medium.com/@dreamume/leetcode-162-find-peak-element-cc780b9cf5b4
Review
Survey on Scalable Failure Detectors
http://www.scs.stanford.edu/14au-cs244b/labs/projects/song.pdf
有关故障检测机制的另一篇文章,本文比较简短易懂。
故障检测
本文介绍两种故障检测机制:Gossip和Dynamo
Gossip模型基于心跳,随机节点在某时间段维护一个成员列表。接收节点使用更高版本号的成员列表,如果一段时间内没有某节点心跳更新则认为该节点故障。
GRR协议选择某节点进行协调而不是使用随机节点。使成员列表同步时间复杂度优化为lgn
Dynamo基于随机ping和分布式故障确认。节点响应ping包则表示节点正常,如一个节点ping另一个节点无响应,则该节点请求其他k个节点去ping,如k个节点都无法获得响应,则被标记为故障。
对于故障恢复,心跳更快更容易确认,然而效率不高,而ping包不能保证恢复。
实现
Dynamo使用UDP,gossip协议使用的是TCP
协议分析
延迟
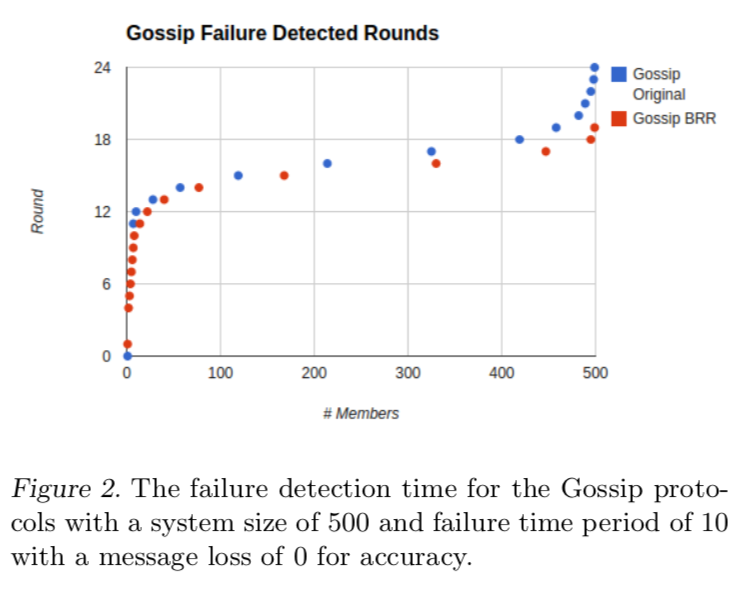
Gossip协议故障检测速度函数类似于一个S形。如图:
Dynamo消息丢失检测速度,如图:
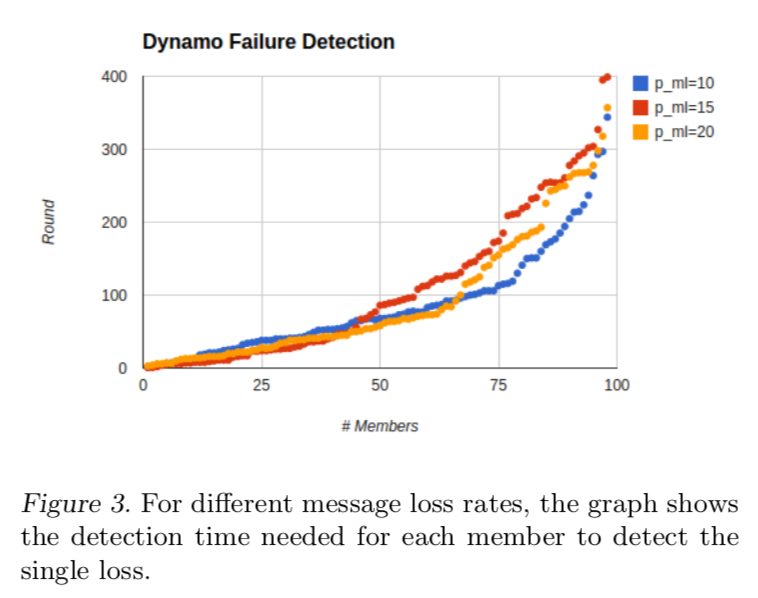
Dynamo在消息丢失检测上比Gossip更稳定
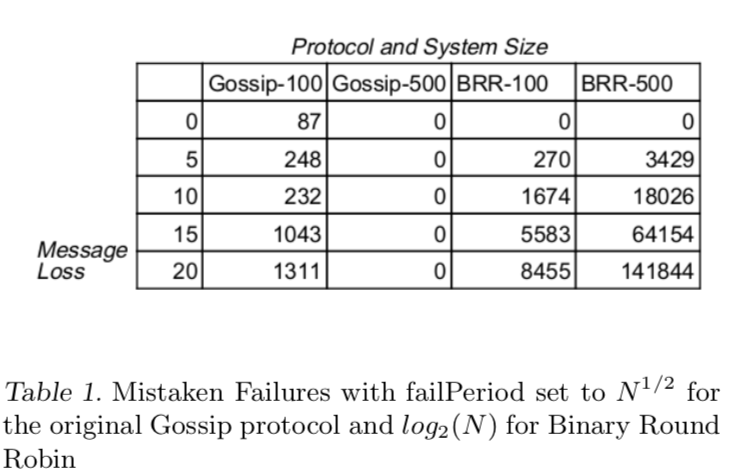
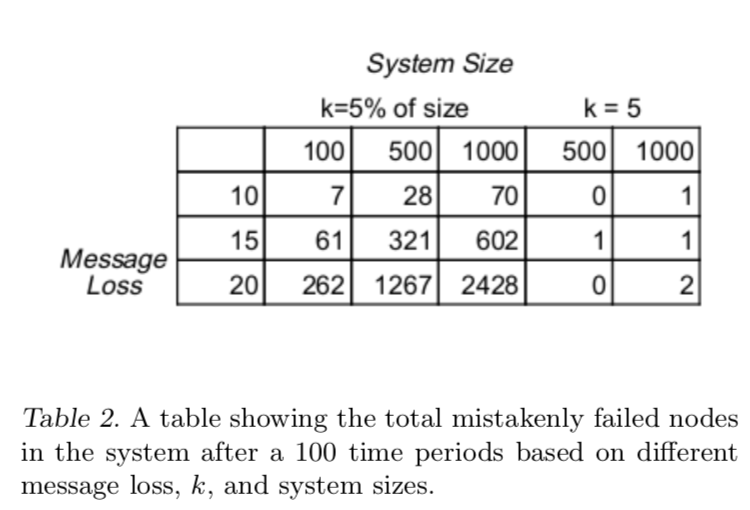
误认故障
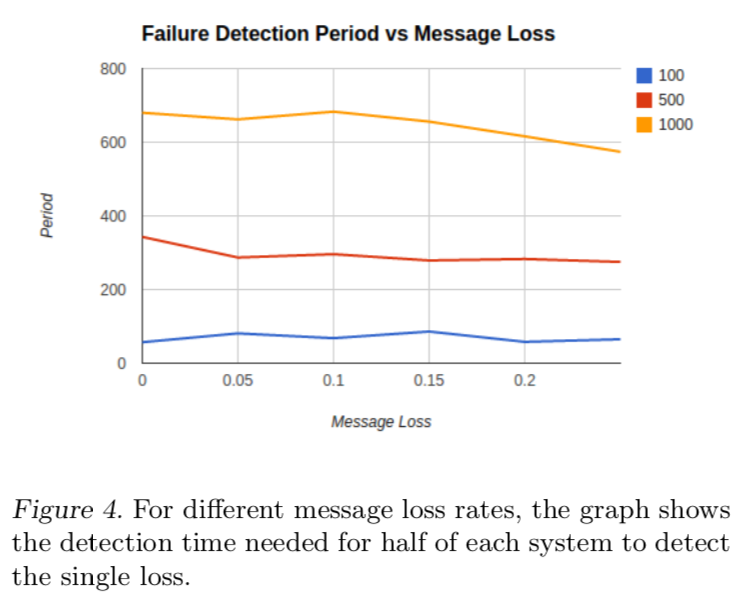
Gossip协议会频繁调整故障节点信息,gossip协议更加依赖故障检测周期而不是消息丢失。即使消息丢失,节点会等到新周期消息来更新。如图:
Dynamo依赖k中转节点ping可能故障的节点来确定故障。
可扩展性
Gossip协议每个工作节点每轮发送协商信息。每轮发送的总信息需要:N(8N + 4)字节。
Dynamo需要的流量为线性。
总结
Gossip有低的错误检测延迟,但对消息丢失更敏感,Dynamo不能保证错误检测延迟,但对消息丢失相对不敏感。
Tips
- 固定作息,保持头脑清晰,能保证好的工作效率
Share
Fermat’s Theorem in What is Mathematics
如果p是一个质数,而整数a不是p的倍数,则有a(p-1) ≡ 1(mod p)
证明:
假设m(k) = k * a, 1 <= k < p,则m(1) * m(2) * … * m(p - 1) = 1 * 2 * … * (p - 1) * a(p - 1)不能被p整除。
设M = m(1) * m(2) * … * m(p - 1),S = 1 * 2 * … * (p - 1),则M - S ≡ 0 (mode p)
M - S = S * (a(p - 1) - 1),则a(p - 1) ≡ 1 (mode p)
进一步推理可得更一般化的结论:任意正整数n,n和整数a无除1以外的公约数,且设t(n)为小于n的整数跟n无除1以外公约数的个数,则at(n) ≡ 1 (mod n)
该结论可解leetcode某题。